Кабель
- Автор темы bejef
- Дата начала
Кабель

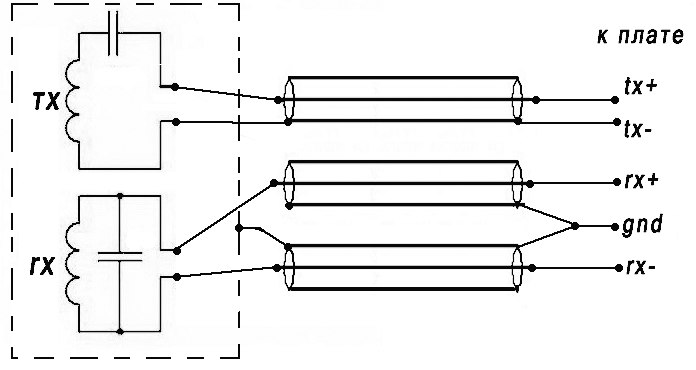
4 жилы в одном экране ( считаю это не правильным)
2 жилы в отдельном экране каждая+ 2 жилы без экранов, и это правильный "хелу"
А есть ещё более "правильный" "хелу", но только его нет в Украине. И под заказ в эвропе идёт.
Я имел возможность общения с компанией "сивакс" по данному вопросу.
На сегодняшний день использую два варианта:
1) три жилы каждая в своём экране, по схеме распайки что давал выше.
(продают на "мд4" )
2) иногда изготавливаю кабель из МПОЭ
Как то так выходит, что несколько лет тому всё это было не актуально.
А сейчас, это уже эталон. Погодим ещё годиков пять, и эталоны изменятся.
Однако учитывать этот фактор нужно.
Вложения
-
 35 КБ Просмотры: 118
35 КБ Просмотры: 118
Последнее редактирование модератором:
 .
.Товарищи, да как вы не поймёте, нет "правильно-не правильно" Все варианты рабочие.
"Барс" Владимир, еще на старом ресурсе описывал технологию изготовления датчиков.
Что в корне отличается от того что мы сейчас исполняем с кабелями, экранами, эпоксидками и диаметрами провода.
И как не странно всё работало и очень не плохо работало. Если сравнивать с нынешней технологией, то с уверенностью можно говорить что работало не хуже.
Тогда главный вопрос???
А стоит ли заморачиваться?
Мой ответ, нет не стоит.
Более простую технологию использовать стоит. Доступный, кабель использовать -стоит.
А парится по этому поводу, правильно-не правильно, не стоит.Был бы эффект на 50% улучшения.
А так топчемся вокруг 10% в лучшем случае.
"оззи" довёл всем что не резонансная РХ, это лучшее. Так нет, всё равно все умнее хотят быть.
Ну-ну.")
"Барс" Владимир, еще на старом ресурсе описывал технологию изготовления датчиков.
Что в корне отличается от того что мы сейчас исполняем с кабелями, экранами, эпоксидками и диаметрами провода.
И как не странно всё работало и очень не плохо работало. Если сравнивать с нынешней технологией, то с уверенностью можно говорить что работало не хуже.
Тогда главный вопрос???
А стоит ли заморачиваться?
Мой ответ, нет не стоит.
Более простую технологию использовать стоит. Доступный, кабель использовать -стоит.
А парится по этому поводу, правильно-не правильно, не стоит.Был бы эффект на 50% улучшения.
А так топчемся вокруг 10% в лучшем случае.
Автоматическое объединение двойного сообщения
ЗЫ"оззи" довёл всем что не резонансная РХ, это лучшее. Так нет, всё равно все умнее хотят быть.
Ну-ну.
Последнее редактирование:
Но тем не менее, вариант вполне рабочий. Доказано опытом и практикой не одним мной и не одним годом.
Когда все проводники от двух контуров в куче одной, внутри одного экрана, имеют место быть наводки передающего контура на приёмный, существует переменная емкостная связь, причем не всегда постоянная, в зависимости от дребезга и изгибов кабеля, да и в таком варианте мы боремся сначала сводим датчик в минимум проникновения сигнала с контура TX в контур RX, а потом, по Вашему внутри кабеля опять подводим при помощи емкости между сигнальными проводниками контуров напряжение с контура TX на сигнальный проводник контура RX. Да оно как-то работает, но это не значит, что так правильно, да и работу такую мне не нужно, особенно, когда нужно получить максимум стабильности при высокой чувствительности.
Когда все проводники от двух контуров в куче одной, внутри одного экрана, имеют место быть наводки передающего контура на приёмный, существует переменная емкостная связь,
Я то в конце то концов делаю с кабелем три проводника, каждый в своём экране.
Мне нравится, что он доступный по цене, вмеру гибкий. И довольно прочный.
И ещё плюс, толщина проводников вполне меня устраивает. В отличии проводников из кабеля ВГА мониторов. Те тонкие.
Автоматическое объединение двойного сообщения
Ссылка на кабель
Последнее редактирование:
"оззи" довёл всем что не резонансная РХ, это лучшее. Так нет, всё равно все умнее хотят быть.
Правильнее делать слабо-резонансный датчик, когда к большой индуктивности контура RX в параллель включаем емкость, например 150 пФ, резонанс будет на 200кГц, там нет мощных передатчиков, то есть нет помех, но для ВЧ излучений, это будет уже фильтром, и помехи в большинстве своём будут подавлены за полосой этого контура, в то-же время для прибора, что работает в диапазоне 4-20кГц, такой резонанс практически не ощутим никак, я уже на практике это проверил. Вот так нужно делать, а просто вообще без резонанса, это полу-мера.
Согласен с тем, что не резонансный или слабо-резонансный датчик гораздо стабильнее, чем резонансные.
Автоматическое объединение двойного сообщения
Товарищи, да как вы не поймёте, нет "правильно-не правильно" Все варианты рабочие.
Повторять такого рода ошибки не стоит, только из-за утверждений, что всё-равно как-то работает.
Последнее редактирование:
шестиугольные колёса у автомобиля
А разница, между ехать и ехать Была только одна Как!
Если строим не резонансную РХ, наваливаем витков побольше.
Мотая с резонансом близким к контуру ТХ, можно существенно сэкономит на намотке. 150 витков вполне нормально. Можно и сотню.
Опять же, мы с вами общаемся на разных языках с разным погружением в тему. Я не радиомеханик
") просто автомеханик.
просто автомеханик.И я привык испытать в деле, ту или иную технологию. Только тогда я могу принять или не принять теорию.
Знаю у Вас тоже довольно богатый опыт экспериментов.
Так вот, существенных различий нет. Именно существенных от не работает, до работает великолепно.
Что "хелу" четыре в одном, что самоделка с раздельными экранами. разница в мизер.
Условно берём что блок идеален, и датчики разных конструкций испытываются на нём.
ЗЫ
Ярослав.
Уважаю ваше мнение, понимаю, иногда делаю . Уважте и моё. Оно имеет право на существование.
А люди пускай себе фильтруют, на свой ум-понятия. Что я и делал в самом начале, до наработки практики.


Последнее редактирование:
"оззи" довёл всем что не резонансная РХ, это лучшее. Так нет, всё равно все умнее хотят быть.
Ну-ну.
Ну-ну.
как говорится не смотря на теоретически верные рассуждения выше в пользу резонансных датчиков народ начинает двигать в сторону популистских решений.ну что ж, пожуем - увидим, сможет ли практика победить теорию и что из этого выйдет. любопытно.

сезон безрезонансных катушек объявлен открытым
У нас уже давно открыт. У меня ещё с прошлого года. Сезон отходил.И продал несколько. Некоторые даже не подозревают об этом
как говорится не смотря на теоретически верные рассуждения выше в пользу резонансных датчиков
А если на поисковых характеристиках разницы нет, то можно побороться и за стабильность.
Или я не прав?
Ну так никто с этим и не спорит. Теория есть теория. И всегда кажется и хочется поиметь лучшее.
Я то в конце то концов делаю с кабелем три проводника, каждый в своём экране.
Мне нравится, что он доступный по цене, вмеру гибкий. И довольно прочный.
И ещё плюс, толщина проводников вполне меня устраивает. В отличии проводников из кабеля ВГА мониторов. Те тонкие.
Я то в конце то концов делаю с кабелем три проводника, каждый в своём экране.
Мне нравится, что он доступный по цене, вмеру гибкий. И довольно прочный.
И ещё плюс, толщина проводников вполне меня устраивает. В отличии проводников из кабеля ВГА мониторов. Те тонкие.
Автоматическое объединение двойного сообщения
Ссылка на кабель
Последнее редактирование:
У всех по разному. У нас уже давно открыт. У меня ещё с прошлого года. Сезон отходил.
И продал несколько. Некоторые даже не подозревают об этом
У нас уже давно открыт. У меня ещё с прошлого года. Сезон отходил.И продал несколько. Некоторые даже не подозревают об этом
А если на поисковых характеристиках разницы нет, то можно побороться и за стабильность.
Если кому-то нужен "стабильный" датчик - не вопрос, получите стабильный датчик
Мне, например от датчика нужны несколько другие параметры ЗЫ. Пожалуй еще добавлю любителям "безрезонансных" датчиков. Поскольку в Фортуне по входу стоит конденсатор на 10n в итоге у вас все-таки резонансный датчик. А вот на какую частоту - это уже можете посчитать сами
И поскольку тема о кабеле добавлю, чтобы совсем не оффтопить тут.
Вопросы экранирования кабелей и их подключений разжеваны в специальной литературе от и до. С картинками, формулами и т.д. . Только что мультиков не снимают по этому поводу. Можно почитать, осмыслить и применять в тех рамках, которые имеются. Есть кабель для "правильного" подключения - подключаем. Нет кабеля - смотрим, думаем и выбираем подходящий способ.
Но это как правило работает для тех у кого есть желание разобраться в теории и делать правильно. Для тех кому "а скока витков мотать" можно подключать как угодно, датчик у вас будет худо-бедно работать при любом подключении
Последнее редактирование:
Безрезонансный датчик уже залит, вопрос - если емкость в блоке повесить, на остальные резонансные датчики сильно это влиять будет при их подключении? Хотя в принципе можно и в самом разъеме ее смонтировать наверное.
Емкость 150-200 Пф практически никак не будет влиять на работу датчика на частотах 4-20кГц, точнее влияние настолько мизерное, что этим можно смело пренебречь.

Не уверен я чего-то... Будем посмотреть....